 |
| fig.1. Fürstenwald setup. |
Now have even I changed side and started to map fully digital. The main reason besides I like to challenge myself was that Open Orienteering Mapper opened up a way to step into digital mapping before and without spending a lot of money on hardware. So here I document the setup developed for revisioning the map of Fürstenwald, Chur, Switzerland.
The point with digital mapping is, that you can choose your base map according to the actual task.
Hardware
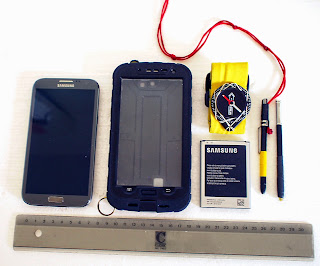 |
| fig.2. The overview |
- Samsung Galaxy Note 2, 5.5 inch screen
- with S Pen (inductive) and extra S Pen (waterproofed)
- with 1 original battery 3100 mAh and 1 extra battery 3400 mAh (total 13h with GPS on and screen on max)
- inside a waterproof case by redpepper
- protective film (anti-glare)
Pics:
 |
| fig.3. Normal and waterproof S Pen (Latex & shrinking hose) |
Comments: Seems to me pretty ideal for mappers. Inductive pen, allweather and easy energy supply handling (no external battery). Total weight: 250gr. Total costs: about 200 CHF /190 Euro (Phone bought second hand)
Software
 |
| fig.4. Screenshot OOM 0.5.96 with old map as basemap, scribble plus activated GPS tracking and positioning. |
- Open Orienteering Mapper 0.5.96 for Android
Comments: One of the advantages of the OOM is, that you actually can continue working like you did in the analogue days. You just can scribble your features on the map. This is useful for features can not finalize directly (f.ex. wide greens). Of course, the rest you directly draw as map features. Other advantages: it is free and it is under development. You can contribute to its future.
A disadvantage of OOM is that it is not (yet) 100% compatible with recent OCAD formats (bascially some difference in dashing and no virtual gaps in OOM). In the actual case, revising an existing OCAD map, I therefore imported scribble tiles (georeferenced pngs) and digitized objects into OCAD11 for the finishing.
Basemaps
- Snapping Grid
- Old Map in gray and magenta tones
- LiDAR Terrain Model contours 1m
- LiDAR Surface Model (Both slightly outdated (!) therefore an recent additional Aerial)
- Aerial Orthophoto
 |
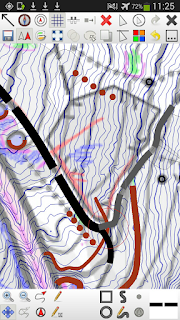
| fig.5. Live extraction of natural borders from the orthorectified aerial photo |
 |
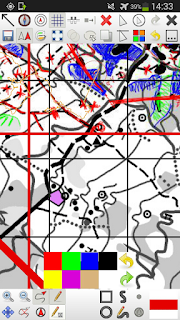
| fig.6. Old map overlayed with 1m contours. Also visible the snapping grid (thin hairlines) |
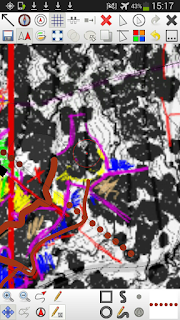 |
| fig.7. Screenshot defining vegetation borders based on the DSM. |
Comments: To fit in changes into the existing map, I use a "snapping grid" consisting in the old map features vector lines. Basically very thin/optionally invisible lines (in protected mode) I can snap to while drawing new features.
In this case the other base maps or "locator maps" where provided. As stated in the quote above the strength of digital mapping is, that you can choose base´maps after the actual situation. In open forest you can identify every single tree with the surface map. In more dense forest the contours are a big help. The internal GPS is indeed the very last measure.







.JPG)
.JPG)